„Consciousness is a state that defies definition, but which may involve thoughts, sensations, perceptions, moods, emotions, dreams, and an awareness of self, although not necessarily all of these. Consciousness is a point of view, an I, or what Thomas Nagel called the existence of „something that it is like” to be something.” – Wikipedia
Ten kto zastanawiał się nad pojęciem samoświadomości wie, że sprawa nie jest prosta. Zwłaszcza, jeśli próbuje się je zrozumieć z opisów jak ten powyżej. Brak dokładnej definicji samoświadomości uniemożliwia naukową dyskusję na jej temat. Oczywiście nie przeszkadza to adeptom tzw. nauk humanistycznych w swobodnym używaniu tego słowa. Tym niemniej rozumienie słów, których się używa może okazać się przydatne.
Poniżej proponuję inżynierskie w swej jednoznaczności przedstawienie istoty samoświadomości. Posłużę się w tym celu modelem automatu – robota.
Robot będzie dążył do uzyskania pożądanego stanu świata zewnętrzenego.
Najprostszym modelem takiego robota jest pudełko wyposażone w receptory – czujniki i efektory – siłowniki. Dzięki receptorom do robota trafia informacja o stanie otoczenia, a przy pomocy efektorów stan ten może być zmieniany. Zobacz rys. 1.
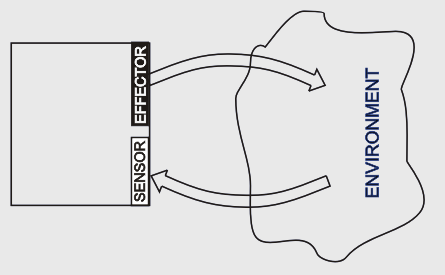
Fig. 1. Robot oddziałujący z otoczeniem.
Zasada działania takiego robota jest prosta. W odpowiedzi na niektóre stany otoczenia robot wykonuje pewne działania w tym otoczeniu. Aby skojarzyć dany stan otoczenia ze stowarzyszonym działaniem robot powinien być wyposażony w pamięć, w ktorej zapisana będzie odpowiednia lista stanów i czynności. Rysunek 2.
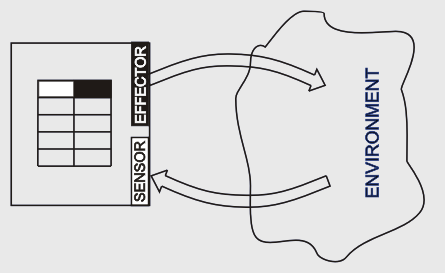
Fig. 2. Robot z pamięcią.
Okazuje się, że tak skonstruowany robot jest bardzo zawodny. Na przykład, zmiana własności otoczenia robota na ogół spowoduje, że wspomniana lista przestanie nadawać się do osiągnięcia pierwotnego celu. Poza tym, są sytuacje, w których nie wystarczy mieć do dyspozycji aktualny stan otoczenia. Często właściwa reakcja robota powinna uwzględniać poprzednie stany.
Uwzględnienie wszystkich historii stanów środowiska przy wyborze właściwej reakcji robota jest na ogół niemożliwe.
Rozwiązanie tego problemu jest inne. Należy wyposażyć robota w umiejętność przewidywania stanów otoczenia w odpowiedzi na bodźce dostarczone przez siłowniki. Oznacza to, że robot powinien mieć możliwość wykonania symulacji otocznia oddziałującego z robotem zanim dokonana będzie jakakolwiek operacja na prawdziwym otoczeniu. W pamięci robota powinien się zatem znaleźć uproszczony model otoczenia oddziałującego z robotem. Rysunek 3.
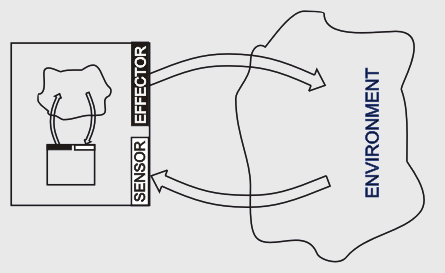
Fig. 3. Robot z samoświadomością.
I to właśnie proponuję nazywać samoświadomością.
Samoświadomość to wewnętrzny model samego siebie oddziałującego z wewnętrznym modelem otoczenia.
Jednocześnie precyzujemy do czego samoświadomość jest potrzebna – do przewidywania skutków własnych działań.
Zbigniew Karkuszewski, 21 maja 2008